on the segmentation of 3d lidar point clouds
This video accompanies the ICRA2011 publication On the Segmentation of 3D LIDAR Point Cloudshttpdbacfrusydeduaucontentphp237htmlpublicationid. This paper presents a set of segmentation methods for various types of 3D point clouds.

Our Approach Label Diffusion Lidar Segmentation Ldls Performs Download Scientific Diagram
A Paradigm on LiDAR Data for Autonomous Vehicle Applications.
. This paper presents a set of. In this paper we present a point data segmentation method based on similarity measures in multi-dimension Euclidean space. Fast Segmentation of 3D Point Clouds.
Though segmentation of dense point cloud obtained from meticulous scanning of 3D models is an old problem fast segmentation of sparse point cloud for robotic applications gained impetus in recent years. Some of the important works regarding the problem are as follows. Many researchers have tried to develop segmentation methods including edge-based surface-based and cluster-based segmentation etc.
Riegl scans is optimised via a simple yet efficient voxelisation of the. This file is just a function file you may need to change a little bit to fit your own code How to use. In order to make these methods more efficient and robust such that they can handle LiDAR data we introduce the general concept of.
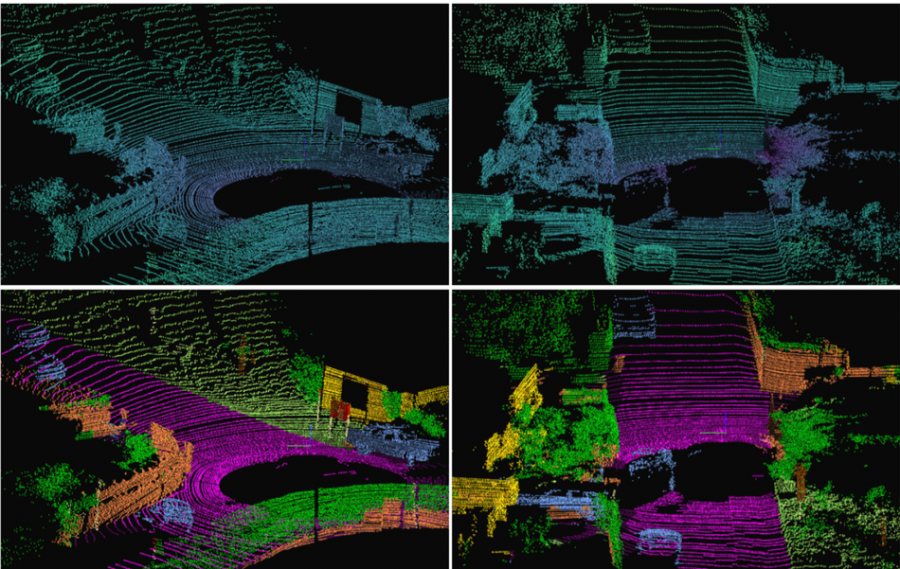
The segmentation of LiDAR point cloud is a key but difficult step for 3D reconstruction of architecture. This paper proposes a fast and precise two-step 3D point cloud segmentation algorithm based on ground plane state tracking. An implementation on Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance from IROS 2019.
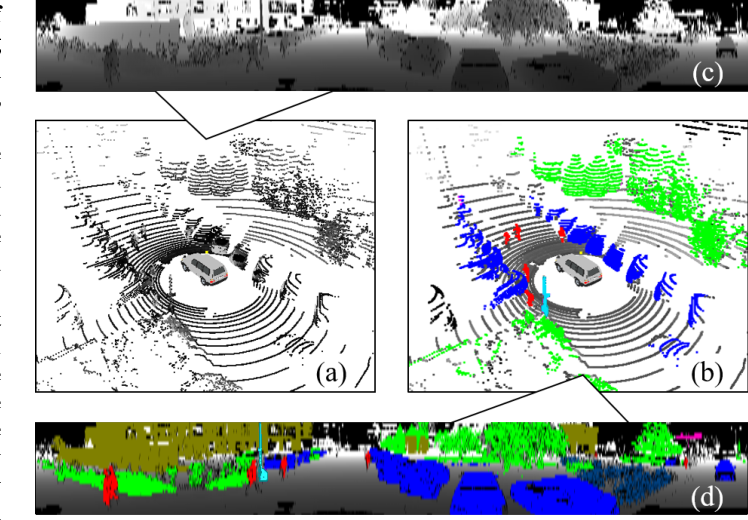
Segmentation of dense 3D data eg. A 3D Bounding Box Detection on steroïd if you will. This paper presents a set of segmentation methods for various types of 3D point clouds addressed using ground models of non-constant resolution either providing a continuous probabilistic surface or a terrain mesh built from the structure of a range image both representations providing close to real-time performance.
Incorporating symmetries of the sensor the algorithm is using a 2D grid approach to cluster data points and extrude object segments in complex scenes. The data representation allows for the handling of partially occluded but connected objects at. Essentially 3D semantic segmentation aim at better delineation of objects present in a scene.
This project was part of my masters degree course Computer Vision in France under supervision of Professor Philippe Xu and. In the paper an improved 3D point clouds. Semantic segmentation is the key to scene understanding in autonomous driving mainly by assigning a category label to each 3D point in the point cloud data captured by the LiDAR.
This paper presents a set of segmentation methods for various types of 3D point clouds. 3D point cloud segmentation is the first and essential step for LIDAR-based perception and its result has a great impact on subsequent tasks such as classification and tracking. All you need is Python NumPy and the data points.
Riegl scans is optimised via a simple yet efficient voxelisation of the. Segmentation of dense 3D data eg. After separating ground and nonground parts many works such as object tracking and 3D reconstruction can be performed.
In this project I worked on implementing the paper titled. Many point-based semantic segmentation methods have been designed for indoor scenarios but they struggle if they are applied to point clouds that are captured by a light detection and ranging LiDAR sensor in an outdoor environment. Ground segmentation is an important step for any autonomous and remote-controlled systems.
3D point cloud semantic segmentation has been a crucial topic in recent years Reference Boulch Saux and Audebert 1 Reference Riegler Ulusoy and Geiger 8. Fast semantic segmentation of the 3D lidar point cloud is useful for 3D reconstruction mapping and unmanned automobile. The algorithm first extracts the points.
However due to the low resolution sensitive noise and complex scene the effective segment of the whole scene is a key issue during unmanned platform data processing. This paper presents a novel approach to segmentation of a dense 3D point cloud generated by a flash lidar type camera. Many point-based semantic segmentation methods have been designed for indoor scenarios but they struggle if they are applied to point clouds that are captured by a light detection and ranging LiDAR sensor in an outdoor environment.
In order to make these methods more efficient and robust such that they can handle LiDAR data we introduce the. The Jump-Convolution-Process JCP is proposed to solve these issues. Abstract and Figures.
The field of Lidar point cloud segmentation is comparatively new. This paper adopts a machine learning method based on random forest. The solid state lidar is one of important tools for environment sensing of unmanned platform and has been widely used in vehicle environment modeling.
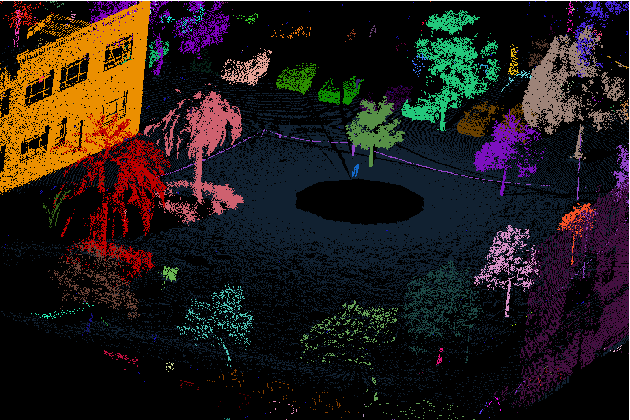
In this paper we study the semantic segmentation of 3D LiDAR point cloud data in urban environments for autonomous driving and a method utilizing the surface information of. It is one of the most challenging tasks that assigns semantic labels to every base unit ie every point in a point cloud that belongs to the objects of interest. In this paper we propose an efficient method for segmenting the ground data of point clouds acquired from multi-channel Lidar sensors.
The challenges of semantic segmentation for the existing deep learning method require large amount data and high computational cost and hardware. JCP converts the segmentation problem of the 3D point cloud into the smoothing problem of the 2D image and takes little time. Add a demo code.

Image Segmentation With Yolov3 And Grabcut In 2022 Segmentation Virtual Environment Dataset

Researchers Introduce Simplebits An Information Reduction Strategy That Learns To Synthesize Simplified Inputs For Neural In 2022 Networking Understanding Learning

Segmentation Based Classification For 3d Point Clouds In A Road Environment

3d Point Cloud Segmentation A Region Based B Model Based And C Download Scientific Diagram

An Evaluation Of Deep Learning Methods For Small Object Detection Deep Learning Learning Methods Learning

The Full Segmentation Pipeline From The Input Point Cloud And Image To Download Scientific Diagram
Point Cloud Segmentation By Surface Growing Algorithm And 3d Boundary Download Scientific Diagram

Dl Architectures On Lidar Point Cloud Segmentation With Three Different Download Scientific Diagram
Pdf Semantic Segmentation Of 3d Lidar Data In Dynamic Scene Using Semi Supervised Learning Semantic Scholar
Our Approach Provides A Panoptic Segmentation For Point Clouds From A Download Scientific Diagram
3d Mininet New State Of The Art Method For Point Cloud Segmentation

3d Point Cloud Segmentation A Region Based B Model Based And C Download Scientific Diagram

Segmentation Based Classification For 3d Point Clouds In A Road Environment
Figure 1 From On The Segmentation Of 3d Lidar Point Clouds Semantic Scholar

Segmentation Of A Point Cloud Of An Urban Scene With The Combination Of Download Scientific Diagram

Segmentation Based Classification For 3d Point Clouds In A Road Environment
Pclv Over Segmentation Results A The Full Point Cloud From A Certain Download Scientific Diagram

Panoptic Instance Semantic Image Segmentation Deep Learning Segmentation Vision Training Annotation

Detect Objects With 3d Boxes For Better Object Detection And Tracking Including The Single Points With Quality To Get T Point Cloud Learning Technology Clouds